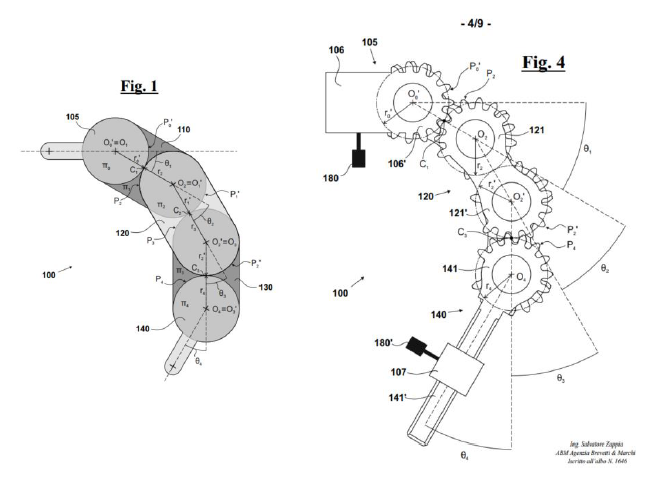
La presente invenzione fornisce un meccanismo non attivato per un esoscheletro robotico di spalla adatto a trasferire la forza di reazione di flessione-estensione generata durante l’azionamento dell’articolazione della spalla attraverso un attuatore posizionato in corrispondenza dell’articolazione della spalla dell’estensione di flessione. Il brevetto consiste in una catena cinematica passiva.

Ente di Ricerca:
Scuola Superiore Sant'Anna