Distortion free-phase demodulation method
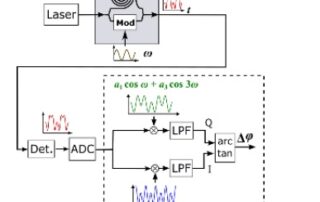
The technology proposes a simple method which removes phase distorsions without increasing noise, and can be implemented in any interferometer with active phase control (fiber-optic, integrated, free-space).
The technology proposes a simple method which removes phase distorsions without increasing noise, and can be implemented in any interferometer with active phase control (fiber-optic, integrated, free-space).
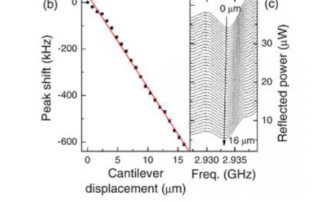
The present invention relates to a method and a device for carrying out position measurements such as scans of surfaces for the study of their topography and physical properties with microscopic resolution, and mass measurements (microscopic masses) by means of probes in dynamic mode, oscillating at a given frequency.
The invention consists of a device for intraoral dental video-endoscopy, which comprises a PC connected to at least one HD color monitor and to at least one intraoral video camera and / or nasal endoscope.
The technology consists of a contact force sensor comprising an inflatable balloon, a processing unit receiving a signal of changes in pressure or deformation in the balloon and a device for notifying the operator of the contact force signal (compliance of fabrics) calculated by the processing unit.
The technology concerns a remote monitoring system for electromedical devices installed in a patient's home that includes a series of functional modules coupled to at least one electromedical device, capable of detecting the operating status of the device.
It is the purpose of the present invention to provide a sensor that allows to accurately monitor the pH value and its variations over time.
The patented invention covers nano- and micro-fabrication techniques of 3D structures using CAD/CAM technology specially designed to process two or more different materials with nanometric and/or millimeter resolution at the same time.
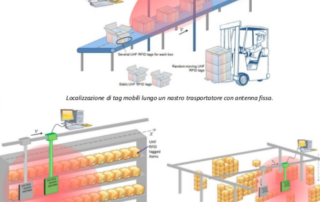
The invention deals with a localization method that finds application in localizing RFID-UHF tags in relative motion with respect to the RFID-UHF reader
The auto-localization system of RFID Robots in indoor environment (AURORA) is a low-cost, reliable and scalable system, which allows robots or other mobile devices to self-locate in an indoor scenario using passive UHF band RFID tags placed at known locations.
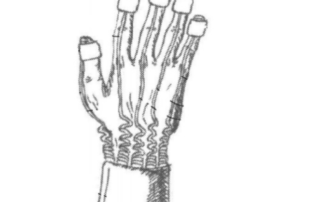
The present invention relates to a device for detecting the position and movement of a human limb comprising a plurality of sensory units connected to at least one coordination unit which manages the data coming from the sensory units and timers their flow.