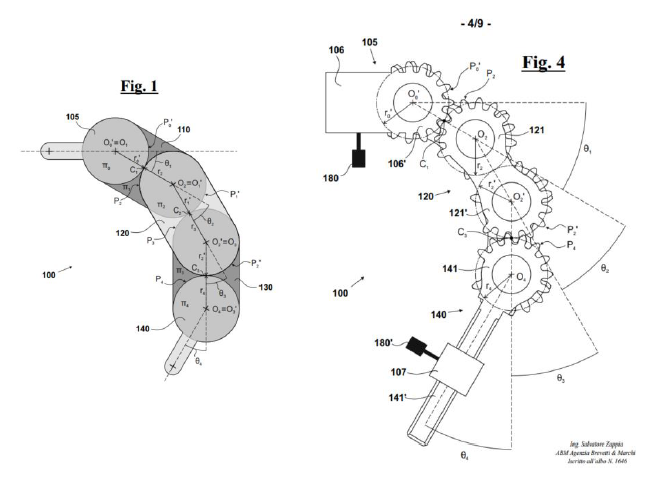
The invention consists in a customizable exoskeleton haptic device for a finger, providing both kinesthetic stimuli along the finger and a three-dimensional skin force on the surface of the fingertip, which can be generated independently of each other or at the same time.

Research Institution:
Università di Siena
Priorities and sectors:
Industry 4.0, Scienze della vita