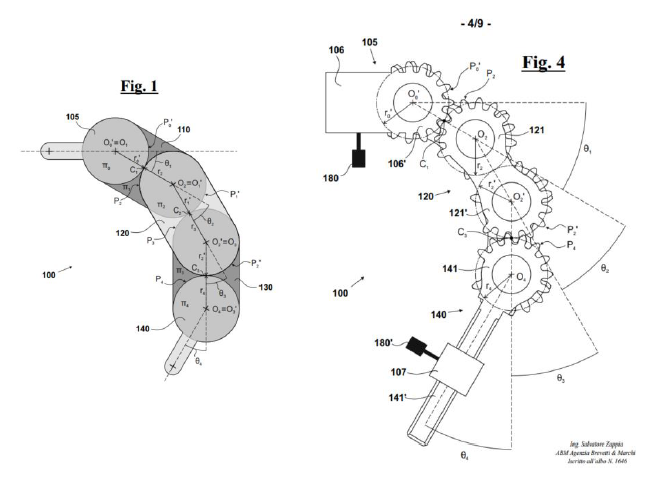
The proposed mechatronic architecture is based on a sensor decoupled from the mechanical action of the robot, so as to provide a reliable measurement of the joint angle

Research Institution:
Scuola Superiore Sant'Anna
Priorities and sectors:
Industria 4.0, Scienze della Vita